osPID used in the Toorcamp Laser
A fantastic project has been making the rounds over the last two days: Hakerbot Labs put together a monster laser that pierced the sky at Toorcamp. […]
A fantastic project has been making the rounds over the last two days: Hakerbot Labs put together a monster laser that pierced the sky at Toorcamp. […]
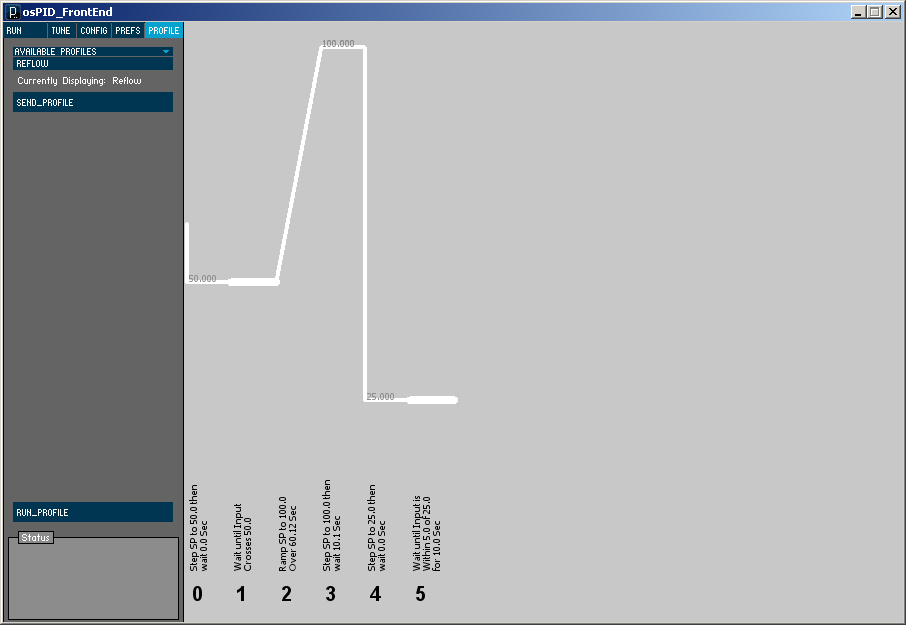
I've just uploaded both firmware and front-end updates to github. There have been numerous tweaks and improvements, be here are the high points: Setpoint-Profile Support Rather than hard-coding a reflow profile, we went with a more flexible approach. Using 3 different commands (setpoint STEP, setpoint RAMP, input WAIT) you can piece together a sequence that [...]
With actual osPID units being spotted in the wild, we felt is was time to create a forum. The goal here is a create a central place where people can get information, show off their awesome projects, and help to improve the osPID for everyone's benefit. So stop by when you get a chance. Help [...]
Huge thanks go out to Phil, who apart from identifying some early bugs has presented us with our first "in the wild" pictures! He spent an hour or two the last couple of nights setting up a sous-vide rig: Two immersion heaters, a circulation pump, and a k-type thermocouple. It's hard to argue with results [...]
With the first osPIDs making their way to customers, we've started receiving our first feedback emails. The most obvious point made so far is that we were lacking a quick-start guide. I've since created a preliminary page for this here. This is a work in progress, but should give you everything you need to get [...]
To Everyone who pre-ordered: Thank you, your unit is in the mail. There are a few extra units that are being assembled as I write this. we'll announce on twitter when orders are open. We're also working on our 2nd (larger) batch. hopefully this will remove availability as an issue.
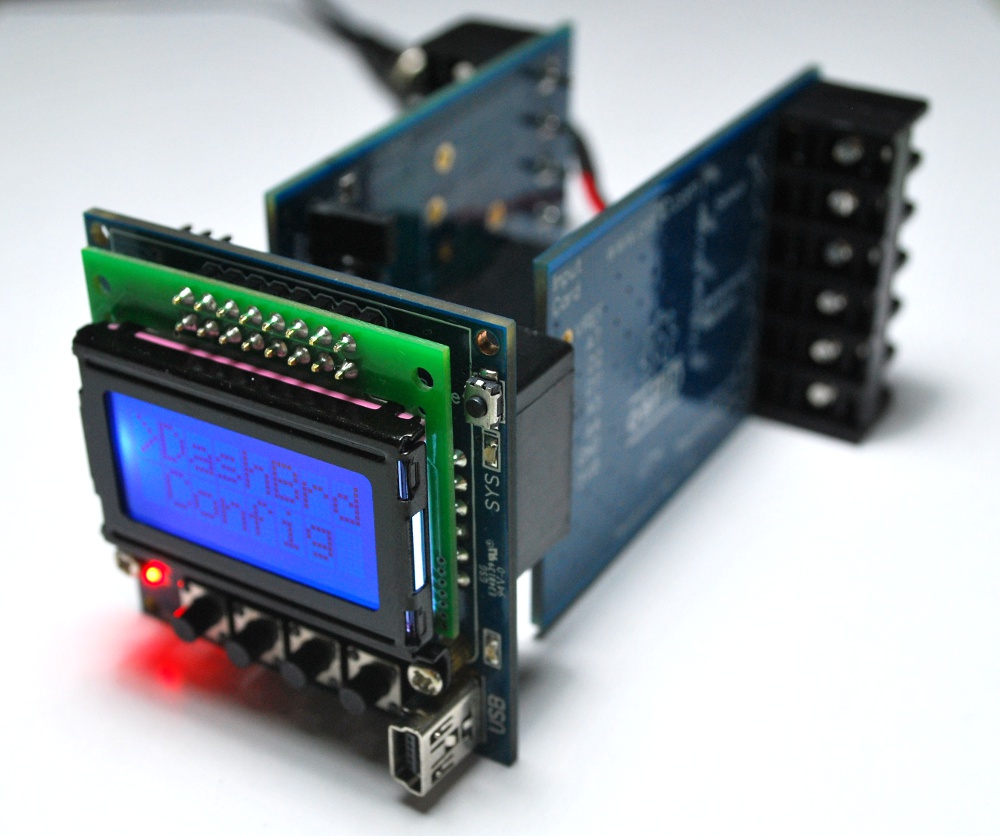
Just a quick post to let everyone know that shipping has started. The first units went out today! all boards are re-flowed/assembled, Just need to test, pack, and ship. Here are some pics to tide you over until your osPID arrives:
Wow. What an amazing first week-or-so. Hackaday, Adafruit, BoingBoing, and Make. It's almost too much to ask! Thanks to everyone for the positive feedback. In the midst of this there is one recurring concern that I wanted to address. Many people seem to be comparing this thing to the $30 PID controllers you can get [...]
The website is still a little rough around the edges, but the product is ready for initial release, so here goes! Let me introduce you to the osPID. We've been working hard over the last several months to build a fully-featured, open source PID controller that's every bit as capable as its closed brethren. [...]